a cura di Ulisse, Elena di Troia, Diomede, Nessuno e ICARO
MARC MENTAT
Al termine della lezione precedente eravamo giunti a modellare una piccola porzione del profilato in oggetto (ogni lato è lungo circa 20 mm), avevamo inserito il vincolo di antisimmetria, ed era stato anche inserito un corpo rigido in testa (vincolo RBE2) al quale imporremo una rotazione predeterminata che solleciterà a torsione il profilato. Si cercherà di valutare l’influenza del taglio della mesh. Vediamo come infittire la mesh; alcune postazioni ad ogni elemento ne sostituiranno 4 (ogni lato verrà diviso in due parti), altri 9 (ogni lato verrà diviso in 3 lati), altri ancora 16 (ogni lato verrà diviso in 4 parti):
• MESH GENERATION> SUBDIVIDE>DIVISIONS>2 2 1>ELEMENTS>ALL EXISTENT
Le suddivisioni sono relative agli assi di elemento x, y, z; abbiamo inserito 2, 3 o 4 a seconda del gruppo nei primi due assi entro piano, il terzo asse ovvero z non subisce alcuna suddivisione anche perché gli elementi piastra con cui stiamo lavorando non godono di una estensione lungo tale asse.
Gli elementi raffinati nascono equi spaziati a meno che non si modifichino i BIAS FACTORS. Se si vuole annullare tale comando possiamo premere UNDO. Abbiamo raffinato la mesh, quest’operazione può sempre essere fatta per controllare quanto i risultati sono funzione della raffinatezza della mesh, i.e. vado a confrontare i risultati calcolati con lo stesso modello geometrico ma con una mesh più o meno raffinata (fitta).
A questo punto bisogna aggiornare le condizioni al contorno perché tutti i nodi nuovi devono seguire il vincolamento relativo antisimmetria e l’RBE2. Tutti i nodi che giacciono su quella faccia devono essere agganciati al corpo rigido; infine bisogna anche lanciare uno sweep perché potrebbero essersi sovrapposti dei nodi, non tutti i nuovi nodi infatti potrebbero essere univoci. Procediamo con lo sweep:
• MESH GENRATION>SWEEP>NODES>ALL EXISTENT
Questo collasso nodale chiude dei tagli infinitesimi che potrebbero essere presenti nella struttura, evita inoltre la nascita o lo scorrimento di cricche.
Passiamo a modificare le condizioni al contorno, applichiamo l’antisimmetria, che tra l’altro è l’unica condizione al contorno che abbiamo definito a tutti i nuovi nodi che giacciono nell’estremo del profilato dove era già stata impostata precedentemente la condizione al contorno:
• BUONDARY CONDITIONS> NODES>ADD e seleziono quelli della faccia sul retro>END LIST (click destro mouse)
 fig.1 Aggiornamento antisimmetria.
fig.1 Aggiornamento antisimmetria.
Infine, passo a modificare l’RBE2. Successivamente applicheremo o una rotazione o una coppia a seconda dei gusti. Il nostro obiettivo è quello di calcolare la rigidezza a torsione della struttura, per cui ho due possibilità: o applico una rotazione e andrò a leggere il momento di reazione vincolare (coppia), oppure applico una coppia e vado a leggere la rotazione, in ogni caso ricaverò poi la rigidezza della struttura a torsione. In questo caso applicheremo una rotazione imposta e dai risultati dell’analisi, come già detto, leggeremo la coppia di reazione vincolare associata. Il rapporto tra rotazione e coppia mi fornisce la cedevolezza mentre il rapporto tra coppia e rotazione mi fornisce la rigidezza.
A quale nodo della sezione terminale impongo la rotazione? A tutti, ma oltre a imporre le rotazioni devo anche spiegare come ogni nodo si deve poi muovere di conseguenza, entro piano e coerentemente con la rotazione della sezione. Ripassando quanto si era già fatto si crea un nodo centrale nella sezione denominato Master (o Retained o Reference) e lo si usa come nodo di controllo di un corpo rigido (i cui nodi restanti sono detti Slave o Tied) che fungerà da vincolo, cioè l’RBE2 (nome in codice), tale corpo rigido mantiene i suoi 6 DOF (u, v, w, $\theta, \phi, \psi$), essi definiscono la rototraslazione del corpo rigido RBE2; ogni nodo lungo il profilo dovrà seguire tale corpo rigido almeno con una porzione dei suoi gradi di libertà. Ogni nodo dipendente i-esimo ha i suoi 6 DOF che sono appunto dipendenti dai 6 DOF del Master. Una volta imposto il vincolo; se impongo una rotazione all’RBE2, il profilato torcerà a sua volta seguendo il movimento del corpo rigido. Aggiorniamo tale corpo rigido (che nel seguito abbrevieremo con CR): i nodi da vincolare sono tutti quelli che nella figura sottostante si trovano sulla destra:
• LINKS>RBE2’S>TIED NODES>ADD seleziono tutti i nodi sulla faccia anteriore (in questo caso a destra) della struttura>END LIST
Per sbaglio abbiamo incluso nella selezione anche il nodo Master, che tuttavia non deve rientrare nell’elenco dei nodi dipendenti, indi per cui dobbiamo rimuoverlo seguendo le istruzioni:
• LINKS>REB2’S>TIED NODES>REM seleziono il nodo centrale del CR>END LIST
Se non lo tolgo il calcolatore mi darà errore (err. 2011), che sta a significare che c’è un problema riguardo alle relazioni cinematiche interne. Ho completato il CR, Il nome di tale vincolo cinematico interno è “estremo_profilo”, inizialmente vedeva 17 nodi dipendenti, ora l’abbiamo aggiornato a 49 (caso r3).
Se tuttavia lanciassi il calcolo non c’è legame tra il moto di quel CR e il moto della struttura deformabile alla quale io vorrei vederlo attaccato. sotto la voce TIED NODES sono raffigurati i 6 DOF, al momento sono tutti spenti. Nella configurazione attuale ognuno dei nodi perimetrali segue la configurazione del CR con nessuno dei suoi gradi di libertà (sono tutti disattivati), devo attivare i gradi di libertà che voglio agganciare al vincolo:
• TIED NODES>DOF1, DOF2, DOF3, DOF4, DOF5, DOF6 (select)
Ho saldato così il terminale al vincolo, i nodi perimetrali seguono il corpo rigido con tutti i loro 6 DOF. Ovviamente i 6 DOF rappresentano nell’ordine (u, v, z, $\theta, \phi, \psi$). Ricapitolando: alcuni nodi della struttura deformabile sono agganciati ad un corpo rigido CR (vincolo cinematico interno), il quale a sua volta ha i gradi di libertà definiti dai gradi di libertà del suo nodo Master.
Vorrei, con questo modello, confermare i risultati della teoria torsionale della trave, secondo De Saint Venant; devo mettermi nelle condizioni più simili possibili rispetto a quelle descritte e richieste dalla teoria, devo quindi permettere il libero moto in direzione assiale di ogni punto della sezione (warping, ingobbamento), per fare ciò devo liberare un grado di libertà il DOF3, disattivando la dipendenza tale DOF3 diventa libero, devo disattivare anche la rotazione x e y (DOF 4 e DOF 5) associate allo spostamento z. Ora i nodi perimetrali seguono il corpo rigido in tutto tranne che nello spostamento assiale in direzione z e nelle rotazioni theta e phi, poiché relativamente a tali DOF disattiverò la dipendenza:
• TIED NODES>DOF3, DOF4, DOF5 (deselect)
 fig.2 Disattivazione DOF.
fig.2 Disattivazione DOF.
Possiamo osservare come i gradi di libertà vincolati nel corpo rigido siano gli stessi che avevamo bloccato nel vincolo di antisimmetria, il corpo rigido infatti può essere interpretato come un piano di antisimmetrica mobile che si aggiunge all’altro piano di antisimmetria fisso che avevamo precedentemente individuato.
Come si può interpretare il collegamento incompleto tra il CR e i nodi della struttura deformabile? Posso immaginare un vincolo cinematico tra la struttura e il corpo rigido, questo vincolo cinematico è lo stesso associato all’antisimmetria ovvero una sfera entro cilindro con una guida, che corrisponde ad una sorta di giunto di Cardano visibile nella figura sul wiki, in questo modo parzializzo la dipendenza dei DOF e libero il warping, prima invece era presente un collegamento diretto tra la struttura e il CR. Tale vincolo verrà posizionato tra ogni nodo perimetrale del CR e i corrispondenti nodi della struttura.
Impongo ora un moto di pura rotazione attorno all’asse z al CR:
• BUONDARY CONDITIONS>NEW>STRUCTURAL>FIXED DISPLACEMENTS • NAME: guida_corpo_rigido • PROPERTIES>seleziono tutti i DOF, li pongo tutti omogenei a parte la rotazione in z che dovrà essere non nulla ma pari a 0.0005 rad/mm
 fig.3 Rotazione imposta.
fig.3 Rotazione imposta.
 fig.4 Rotazione imposta.
fig.4 Rotazione imposta.
Le rotazioni nel Mentat sono sempre espresse in radianti. Quanto dovrà valere in modulo la rotazione imposta? Il testo dato dice che la rotazione per unità di lunghezza deve essere pari, sul profilato completo, a 0.001 rad/mm. Noi stiamo modulando soltanto metà oggetto. Poiché è presente un piano di antisimmetria, sarà sufficiente imporre una rotazione di 0.0005 rad/mm ad un estremo del profilato (dove c’è il CR), la struttura per come è stata costruita ruoterà antisimmetricamente all’estremo opposto, in questo modo la consegna viene rispettata (successivamente tale rotazione verrà corretta con 0.001 rad/mm poiché la rotazione assegnata è già relativa ad un’unità di lunghezza).
Vorremo poi rendere indipendente la rotazione per unità di lunghezza rispetto alla lunghezza effettiva della struttura che stiamo considerando (in questo caso l) generalizzando il più possibile il nostro modello. Imponiamo quindi una rotazione che si adegua automaticamente al variare della porzione di struttura modellata. Essendo il modello stato costruito con l’estremo posteriore a z=0 e quello anteriore a z=l, potrei associare al nodo Master una rotazione che è pari a 0,0005 rad/mm *z (versione corretta: 0.001 rad/mm *z), dove z è la coordinata del nodo di riferimento per la lunghezza. Per fare ciò devo definire la funzione che modulerà la rotazione z, che poi verrà selezionata dalle proprietà della condizione al contorno guida_corpo_rigido.
Creiamo la funzione modulante (TABLE):
• BUONDARY CONDITIONS>TABLES>NEW • NAME: lineare_in_z • INDEPENDENT VARIABLE V1>TYPE> z0_coordinate (original si riferisce dell’indeformata, current alla deformata)>OK • FORMULA (select)>v1>OK
 fig.5 Creazione funzione modulante
fig.5 Creazione funzione modulante
 fig.6 Definizione caratteristiche funzione modulante
fig.6 Definizione caratteristiche funzione modulante
 fig.7 Definizione caratteristiche funzione modulante
fig.7 Definizione caratteristiche funzione modulante
Si è utilizzata una sola variabile indipendente in quanto in questo caso non si ha ad esempio una dipendenza temporale in quanto trattasi di calcolo statico, posso avere fino a 4 variabili in totale. Inoltre, come visto, si è associata la funzione alla coordinata z dell’indeformata, in questo caso va bene; se avessi avuto a che fare con una forza centrifuga avrei dovuto associare la funzione alla coordinata z della deformata. La variabile indipendente v1 corrisponde quindi alla coordinata z dello specifico nodo. La funzione (TABLE), può essere definita per punti (DATA POINTS) che poi il sistema interpolerà linearmente oppure posso fornire direttamente la formula (FORMULA). Nel nostro caso si è definita una funzione linearmente proporzionale alla coordinata di ciascun punto.
Definita la funzione, torniamo alle condizioni al contorno e inseriamo la dipendenza dalla funzione appena creata:
• BOUNDARY CONDITIONS>guida_corpo_rigido>PROPERTIES>TABLE> lineare_in_z>OK • TABLE(functions)>lineare_in_z
Per tornare a vedere il modello andiamo su:
• SHORTCUTS>MODEL>OK
C’è ancora qualcosa che non funziona, tuttavia per ora non siamo in grado di accorgercene dunque proseguiamo fino alle soluzioni e vediamo cosa succede. Andiamo nel menu JOB che gestisce i lavori di calcolo:
• JOB>NEW>STRUCTURAL>PROPERTIES>INITIAL LOADS>OK (controllando che entrambe le condizioni al contorno siano simultaneamente attive)
 fig.8 Nuovo lavoro di calcolo.
fig.8 Nuovo lavoro di calcolo.
 fig.9 INITIAL LOADS
fig.9 INITIAL LOADS
Il menù LOADCASES descrive delle porzioni di storia di storia di carico, che interessano se esiste una dimensione temporale o ad esempio se stessimo facendo un’analisi modale, nel nostro caso può dunque essere saltato. INITIAL LOADS sono i carichi da applicare all’istante 0 della simulazione (nel nostro caso avendo a che fare con una simulazione statica quell’istante iniziale corrisponde anche a tutti gli istanti di tempo disponibili), in questo menu dovrebbero essere visibili tutte le condizioni al contorno che avevamo definito (posso disattivare selettivamente l’una o l’altra a seconda della simulazione che voglio fare). Il menù JOB RESULTS è il menù che permette di selezionare i risultati che vorremmo trovare scritti nel file dei risultati, non è possibile infatti scrivere i risultati nella loro completezza, otterremmo un file di dimensioni troppo grandi; conviene selezionare solo i risultati che effettivamente servono.
• JOBS>PROPERTIES>JOB RESULTS: • STRESS IN PREFERRED SYS (select)>LAYERS: OUT & MID; • EQUIVALENT VON MISES STRESS (select)>LAYERS: MAX & MIN • 1ST ELEMENT ORIENTATION VECTOR (select)>LAYERS: DEFAULT • 2ND ELEMENT ORIENTATION VECTOR (select)>LAYERS: DEFAULT
 fig.10 Selezione dei risultati.
fig.10 Selezione dei risultati.
Selezionando l’opzione: STRESS IN PREFERRED SYS, si ottengono le tensioni nel sistema definito come preferenziale (ovvero che noi avevamo scelto come tale); inoltre devo specificare i LAYERS (strati), ossia dove voglio che tali sforzi siano campionati: ALL che indica tutti i punti di integrazione prestabiliti secondo la regola di Simpson; OUT & MID la quantità in oggetto viene restituita al TOP e al BOTTOM e al piano mediano MID; LIST permette di definire una lista di punti, MAX & MIN ci fornisce i valori massimo e minimo di quella quantità lungo lo spessore, DEFAULT fornisce la soluzione solo al piano medio (pessima idea per gli elementi piastra, perché non tiene conto della flessione, e non si nascondono i picchi di tensione). Se la piastra è costituita di un unico materiale, lo stato tensionale massimo è per forza o al TOP o al BOTTOM. Le opzioni: 2ST ELEMENT ORIENTATION VECTOR e 2ND ELEMENT ORIENTATION VECTOR scrivono nel file dei risultati come è orientata la freccia rossa che si vede nell’input, ossia come è orientato il sistema di riferimento preferenziale, se non li attiviamo il sistema non è in grado di plottare il tensore degli stress poiché non sa come orientarlo nello spazio; queste grandezze non variano lungo lo spessore per cui si è scelto di visualizzare il valore di default calcolato al piano medio.
 fig.11 Grandezze base elemento.
fig.11 Grandezze base elemento.
Queste erano quantità, scalari e vettoriali, base elemento. Passiamo ora a valutare le grandezze su base nodo selezionando l’opzione CUSTOM:
• DEFAULT>CUSTOM • DISPLACEMENTS (select) • ROTATION (select) • REACTION FORCE (select) • REACTION MOMENT (select) • TYING FORCE (select) • TYING MOMENT(select): mi da le forze e i momenti che l’RBE2 mi da sulla struttura • OK>OK
 fig.12 Grandezze base nodo.
fig.12 Grandezze base nodo.
Se non avessi selezionato gli spostamenti e le rotazioni nodali non avrei potuto osservare le deformate. Le quantità EXTERNAL FORCE e EXTERNAL MOMENT, che inizialmente avevo selezionato, le ho poi rimosse, non essendoci in questo modello delle forze o momenti esterni, avrei plottato delle quantità nulle (è utile per vedere come vengono convertite a forze nodali le azioni distribuite).
Le opzioni REACTION FORCE e REACTION MOMENT sono le coppie e i momenti di reazione vincolare associati ai vincoli esterni, quelli collegati con i vincoli a terra, in questo caso quindi l’antisimmetria. Se voglio avere le reazioni associate ai vincoli cinematici interni, cioè al corpo rigido ad esempio, devo selezionare le opzioni TYING FORCE e TYING MOMENT, ripetiamo che queste sono le forze e i momenti che l’RBE2 applica sul corpo deformabile.
Il sistema ha impostato da sé che si tratta di un calcolo tridimensionale (3D) A questo punto entriamo nel menù ELEMENT TYPES, da questo menù è possibile assegnare ai quadrilateri la loro natura di elemento 75 (il sistema lo farebbe di default, tuttavia è sempre meglio ricordarsi e impostarlo manualmente o per correggere eventuali errori)
• JOBS>ELEMENT TYPES>SHELL MEMBRANE>THICK SHELL (select)> EL QUAD 75>OK>ALL EXISTENT • ID TYPES (select)
 fig.13 Selezione della tipologia di elemento.
fig.13 Selezione della tipologia di elemento.
THICK SHELL è la piastra flesso-tagliante, alla Mindlin, ed è possibile modellarla con elementi quadrilateri 4 nodi (senza i nodi di centro lato) o 8 nodi (con i nodi di centro lato), non sono presenti elementi triangolari; se dovesse essere necessario utilizzare elementi triangolari, si può considerare un elemento quadrilatero poi si farà tendere a 0 la lunghezza di uno dei suoi lati, in questo modo due nodi collassano (devo lanciare uno sweep) in un unico nodo e si ottiene un elemento triangolare. L’unico inconveniente è che lo Jacobiano su questo lato è singolare, dunque non invertibile, dunque il sistema non è univocamente risolvibile, per fortuna lo stato deformativo viene campionato solo ai quattro punti di Gauss, quindi questa singolarità non influisce in maniera interessante in quanto nessuno dei punti di gauss si trova su quel lato. Se avessi utilizzato degli elementi membrana 18 avrei ottenuto un modello privo di rigidezza flessionale (DA EVITARE ASSOLUTEMENTE!).
Torniamo al menu principale e proviamo a lanciare i calcoli:
• JOBS>RUN>SUBMIT>OK
 fig.14 Risultati 1.
fig.14 Risultati 1.
Esce sotto l’opzione EXIT NUMBER, il numero 3004, il calcolo è stato portato a termine con successo, tuttavia risulta esserci qualcosa che è andato storto, infatti compaiono un sacco di zeri poiché abbiamo sbagliato qualcosa nel definire il caricamento esterno, ovvero il sistema nasce scarico e scarico rimane. Probabilmente ho sbagliato a definire il solo elemento caricante della mia struttura, cioè la rotazione imposta sull’RBE2, non l’abbiamo associata al nodo. Quando CURRENT INCREMENT rimane a 0, e così anche SINGULARITY RATIO, probabilmente tutto è rimasto fermo in quanto niente era stato caricato. Torniamo al menù principale per controllare cosa non va: BOUNDARY CONDITIONS: guida_corpo_rigido non è associata a nessun nodo:
• BOUNDARY CONDITIONS>NODES ADD>seleziono nodo centrale RBE2>END LIST
 fig.15 Selezione del nodo centrale RBE2.
fig.15 Selezione del nodo centrale RBE2.
Vincolo il nodo Master e tutti gli altri lo seguiranno, posso vincolare i DOF che erano indipendenti, commetto un errore se vincolo un DOF Slaves in quanto è già vincolato e non posso vincolarlo ulteriormente, pena errore di calcolo del codice che non porta a termine il calcolo; peggio ancora sarebbe se il calcolo non va in errore e non si blocca, otterrei un risultato fasullo. MAI VINCOLARE 2 VOLTE UNO STESSO GRADO DI LIBERTA’(DOF), NON SAPPIAMO COSA POTREBBE SUCCEDERE, nel senso che il risultato potrebbe anche essere giusto, tuttavia non posso averne la certezza, data la arbitrarietà di scelta del software.
Torniamo a calcolare (vedi sopra): il calcolo va a bon fine tuttavia il SINGULARITY RATIO ha assunto un valore patologico, è vicinissimo a zero se considero che sto lavorando in doppia precisione, ciò significa che la matrice è singolare. Il sistema non è risolvibile, o meglio la soluzione del sistema non è unica (secondo i principi di questo software per cui la matrice è singolare se il SINGULARITY RATIO è basso, diverso è in matlab).
 fig.16 Risultati 2.
fig.16 Risultati 2.
Il sistema è mal condizionato, dobbiamo tornare indietro e trovare un modo per rendere unica la soluzione. Il solutore ricerca l’equilibrio cercando di minimizzare l’energia potenziale, se la soluzione non è univoca, significa che le configurazioni per cui la struttura è in equilibrio secondo la definizione appena data, non è una sola ma sono infinito elevato a una qualche potenza (a seconda di quante volte è singolare la matrice). Nei componenti strutturali c’è un fenomeno che rende la soluzione non univoca, sono i moti di corpo rigido residui, se il vincolamento non definisce completamente la posizione del corpo nello spazio le soluzioni non sono univoche. Il CR è infatti libero di muoversi nello spazio nella sua interezza, spesso questa è la causa di una matrice di sistema singolare (labilità).
Bisogna rendere univoca la posizione della struttura nello spazio: torniamo a modificare i vincoli: il CR (RBE2) ha un vincolo che definisce la posizione dello stesso dunque a singolarità non è imputabile a questa componente:
• BOUNDARY CONDITIONS>guida_corpo_rigido> PROPERTIES Passiamo quindi all’analisi del corpo deformabile • BOUNDARY CONDITIONS>antisimm_pxy_nz> PROPERTIES
Il vincolo antisimmetrico dice che i punti vincolati si devono spostare secondo quanto imposto, non c’è un moto di CR di traslazione in x, ugualmente posso escludere la traslazione in y e rotazione in z. Mi rimangono possibili un moto di traslazione in z, libera rotazione in x ed in y, quali di questi moti sussistono? La traslazione z è impedita al nodo di controllo dell’RBE2, tuttavia non è così per il corpo deformabile poiché la connessione relativa tra i due corpi prevede un libero scorrimento in direzione z (avevamo reso possibile il warping), al momento dunque nel modello non c’è nulla che vieti, come detto, la libera traslazione in z, tale moto di CR deve essere negato. Non esistono altri moti residui. Devo posizionare adeguatamente la struttura nello spazio, aggiungendo un blocco di grado di libertà tale da rimuovere lo spostamento in oggetto:
• BOUNDARY CONSITIONS>NEW>STRUCTURAL>FIXED DISPLACEMENTS • NAME: posiz_tz, • PROPERTIES>DISPLACEMENTS Z(select)>0>OK>OK • NODES>ADD>seleziono un punto sul lato del vincolo di antisimmetria(possibilmente quello centrale)>END LIST
 fig.17 Moti di corpo rigido.
fig.17 Moti di corpo rigido.
Tale vincolo non era previsto dal testo, tuttavia risulta essere necessario ai fini del completamento corretto dei calcoli, sarebbe un errore inserire un vincolamento in più, otterrei un sistema sovravincolato, in cui un vincolo non è indipendente. Questo vincolo, appoggio, non deve dare nessuna reazione vincolare, assorbe il disequilibrio delle azioni esterne in direzione z.
Rilanciamo il calcolo attivando il vincolo appena inserito:
• JOBS>PROPERTIES>INITIAL LOAD>posiz_tz (select)>OK>OK • RUN>SUBMIT
Ora la matrice non è più singolare e il calcolo è stato portato a termine correttamente.
 fig.19 Risultati corretti.
fig.19 Risultati corretti.
Ora possiamo guardare il file dei risultati; ci sono 2 modi per aprirlo: o con un click sull’opzione OPEN POST FILE, dove post sta ad indicare che si tratta di un file per il post-processing; o dal menu principale si può entrare nel sottomenu:
• POST-PROCESSING RESULTS>OPEN .t16
Le scritte in alto a sinistra mi confermano che sto lavorando sul file dei risultati.
 fig.20 Deformata.
fig.20 Deformata.
Spesso non è detto che sia possibile vedere chiaramente le deformazioni nella struttura deformata, in particolare nei nostri casi dove il materiale utilizzato è acciaio, per cui è possibile amplificare le deformate per osservare meglio i risultati, le due scritte in alto a sinistra mi confermano che sto utilizzando il file dei risultati. Qualunque modifica si faccia al modello, mentre stiamo lavorando sul file dei risultati, non finisce nel file del modello, dunque è persa, NON SI FANNO MODIFICHE SUL FILE DEI RISULTATI. Per passare nuovamente al file del modello devo fare click su CLOSE. Con le opzioni PREVIEW e NEXT scorro gli istanti temporali di un’eventuale simulazione dinamica. È possibile osservare la configurazione deformata secondo varie modalità di visualizzazione: struttura deformata (DEFORMED), struttura indeformata (ORIGINAL), confronto fra le due.
Il menu della deformata prevede delle impostazioni dove è possibile scalarla, li spostamenti vengono moltiplicati per un fattore di scala tale che li renda visibili ad occhio nudo:
• DEFORMED SHAPE>SETTINGS>DEFOMRATION SCALING>AUTOMATIC
Selezionando quest’opzione il software calcola un fattore di scala per rendere visibile la deformata e per non renderla troppo grande serve per scalare la deformata e renderla più evidente. Nel caso in cui un’immagine di questo tipo venga utilizzata in un report di calcolo è fondamentale specificare che è una deformata scalata e specificarne il fattore.
• DEFORMED SHAPE>SETTINGS>DEFOMRATION SCALING>MANUAL>10>OK
In modalità manuale è possibile scegliere autonomamente il fattore di scala. La deformata mi conferma che il moto di warping è presente, il materiale si muove in z in corrispondenza del taglio sul profilato. Andiamo a vedere cosa si può vedere ulteriormente: il menu SCALAR PLOT permette di colorare selettivamente alcune parti sulla base di grandezze scalari associate al modello con varie modalità, quella tipica è CONTOUR BENDS:
• POSTPROCESSING RESULT>SCALAR PLOT>CONTOUR BANDS>SCALAR> DISPLACEMENTS Z (select) • POSTPROCESSING RESULT>SCALAR PLOT>CONTOUR LINES (posso selezionare opzioni diverse per osservare diverse tipologie di visualizzazione dei risultati)
 fig.21 CONTOUR BANDS
fig.21 CONTOUR BANDS
Vorremmo ora visualizzare invece il luogo dei punti che non ha subito spostamenti in z, posso usare il seguente trucchetto:
• POSTPROCESSING RESULT>SCALAR PLOT>SETTINGS
 fig.22 Scala manuale
fig.22 Scala manuale
Scelgo gli estremi di scala, di base sono visualizzati i valori max e min degli spostamenti sul modello, tuttavia posso anche definire la scala in modalità manuale e dire che ho una scala che va da -0.001 a 0.001, cioè compattissima nell’intorno dello 0, tutto ciò che è maggiore del massimo viene colorato in grigio chiaro, tutto ciò che è minore del minimo viene colorato in grigio scuro; in questa maniera mi accorgo benissimo di quali sono i punti che hanno spostamento z nullo che si trova solamente sulla linea dove ho scelto di fissare il nodo in direzione z, il warping è costante in direzione assiale.
Sempre dal menu SETTINGS posso alzare il numero dei livelli. Controlliamo che carichi e che coppie sono effettivamente applicati alla struttura, potrebbero esserci dei tagli, dovuti alla presenza dei vincoli RBE2, se ci sono dei tagli in quella struttura non sto applicando solo torsione, la cosa non è scontata come lo sarebbe per lo sforzo normale. Faccio subito un controllo:
• POSTPROCESSING RESULTS>SCALAR>REACTION FORCE X • POSTPROCESSING RESULTS>SCALAR>REACTION FORCE Y
Sono entrambe non nulli ma comunque tendenti a zero e quindi trascurabili (dell’ordine di 10^-11 N) rispetto ai carichi esterni applicati che distano di molti ordini di grandezza. Per quanto riguarda le rotazioni:
• POSTPROCESSING RESULTS>SCALAR>REACTION MOMENT X • POSTPROCESSING RESULTS>SCALAR>REACTION MOMENT Z
Possiamo stimare quanto vale la coppia in quanto conosciamo tutti i termini della formula disponibile sul wiki, vedi foglio calcolo del prof. Dal confronto tra i vari risultati ottenuti, si deduce come non sia sempre necessario infittire la mesh come si è visto dai vari risultati nel calcolo di $k_{t}$, nel nostro caso infatti la mesh più grezza possibile va benissimo, non è sempre detto che vada a finire così. Andiamo ad analizzare lo stato tensionale, per avere un’idea globale possiamo utilizzare la Von Mises:
• POST PROCESSING RESULT>SCALAR> MAX EQUIVALENT VON MISES STRESS ACROSS LAYERS • SCALAR PLOT SETTINGS >MANUAL or AUTOMATIC
Apparentemente sembra non essere uniforme, in realtà le variazioni sono minime dunque variando la scala riesco a ottenere una visualizzazione più omogenea. Analizziamo le componenti della Von Mises selezioniamo dall’ormai consueto menu le varie componenti tensionali nel sistema di riferimento preferenziale. L’unica componente che è dell’ordine della Von Mises (le altre sono tutte praticamente nulle) è la componente 1-2. Tale tensione è continua da elemento ad elemento, questo fenomeno no è sempre garantito a differenza degli spostamenti e delle deformazioni, che sono continui in corrispondenza dei nodi e lungo i lati; vengono visualizzate le tensioni come continue anche quando in realtà non lo sono, è questione di interpolazione. Posso sempre disattivare questa visualizzazione:
• SCALAR PLOT SETTINGS>EXTRAPOLATION> NODAL AVERAGING>OFF
Ad ogni nodo vengono associate delle quantità associate ai valori medi delle stesse quantità campionate sugli elementi che insistono su quel nodo, una volta calcolate le medie definisce la mappa colorata per interpolazione. Il reale risultato non è quello interpolato ma quello costante a tratti, come ricavare dunque le tensioni, le ricavo a partire dagli spostamenti nodali. I valori calcolati internamente all’elemento finito fanno riferimento alla grandezza considerata, tensioni in questo caso, calcolate ai punti di gauss dell’elemento in questione.
Nel file dei risultati i valori tensionali calcolati sono relativi ai 4 punti di gauss per ogni elemento, poiché questi ultimi sono i punti di campionamento delle tensioni, secondo la teoria vista. Dai punti d gauss poi le tensioni vengono ricondotte ai nodi, questo processo è gestito interamente dal software. Stiamo analizzando la componente 1-2 di tensione nel sistema di riferimento preferenziale al top layer, è negativa, se mi sposto al bottom layer, dovrebbe essere uguale ma con segno opposto per la teoria della trave in parete sottile aperta, il middle layer dovrebbe essere completamente scarico. Apriamo ora il menù MORE che ci permette di analizzare le quantità vettoriali e tensoriali dei risultati, come ad esempio DISPLACEMENTS le TYING FORCE che il nodo Master dell’RBE2 trasmette ai nodi Slaves:
• POST PROCESSING RESULTS>MORE>VECTOR>TYNG FORCE
Sembra che ci siano delle forze sugli spigoli, in realtà non è cosi, ve ne sono anche altre ma sono talmente piccole che se non si fa uno zoom non si riescono a vedere, posso per visualizzarle cambiare la scala. È importante che non venga trasmessa nessuna forza in direzione z (succederebbe se ci fosse il warping impedito) o coppie in direzione x e y. Se vogliamo vedere il tensore degli stress dobbiamo selezionare qualche tensore dal menu TENSOR PLOT, per visualizzare le grandezze di questo menu tuttavia bisogna disattivare MAX & MIN sulla Von Mises, dal menu INITIAL LOADS, ora si può visualizzare il tensore degli stress al top, bottom e middle layers. Si tratta di una pura tensione tagliante.
Dalla misura della coppia e della rotazione abbiamo derivato la rigidezza torsionale apparente della struttura modellata. Se cambio la lunghezza della struttura lo stato tensionale probabilmente sarebbe identico, i risultati sono infatti abbastanza omogenei in direzione z, potremmo eventualmente allungare il profilato in direzione assiale. Quanto è rigida la struttura chiusa equivalente a torsione, devo chiudere il profilato e devo far coincidere i nodi in corrispondenza del taglio, poi farò uno sweep:
• RESET VIEW> FILL> RUOTA RY (per visualizzare correttamente i nodi da sweeppare) • MESH GENERATION>MOVE> annullo la coordinata y dei nodi da far coincidere SCALE FACTORS: 1 0 1>COMBINED >POINTS + NODES>MOVE> SELECT con il mouse dalla vista dove ho il piano yz frontale, dovrei ottenere tutti i nodi coincidenti, la sezione non è saldata ma i due lembi sono accostati • SWEEP>NODES>ALL EXIST
Rilancio il calcolo e ottengo dei risultati diversi, il warping è molto più piccolo non trascurabile ma molto inferiore. Nel passare da sezioni aperte a sezioni chiuse il warping crolla, la coppia necessaria per avere la stessa rotazione cala vistosamente, quindi la rigidezza torsionale cresce di circa 3 ordini di grandezza.
Sezione a cura del docente
comando per lanciare MSC.Mentat in laboratorio INFOMEC
mentat2013.1 -ogl -glflush
Thin walled profile in torsion
Open thin-walled rectangular cross section profile (a longitudinal cut is performed at the lateral wall center line, whose kerf (width) is negligible), 120x40mm outer dimensions, 2mm wall thickness. (Dimensions at the midsurface: 118x38mm), element size ranging from ~10mm to ~20mm.
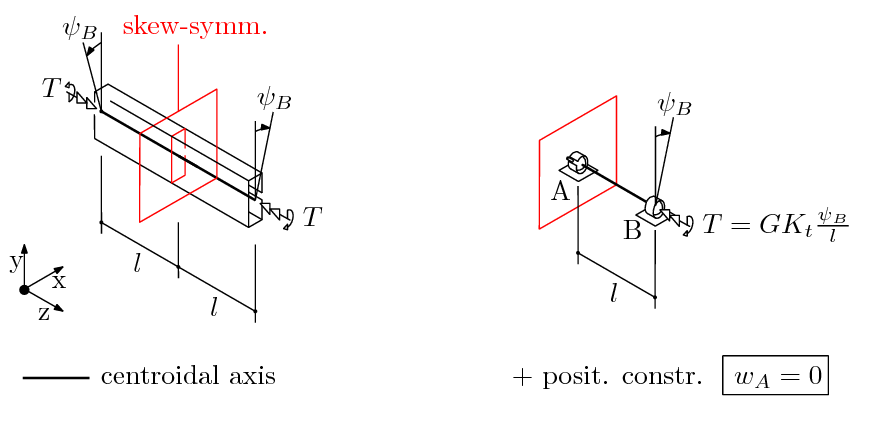
At the A cross section, a skew-symmetry material continuity constraint is applied.
The kinematic constraint at the B point (sphere in cylinder joint) is a positioning constraint, along with the $w_A=0$ axial constraint in A.
A twist per unit length equaling 0.001 radiant/mm is imposed to the profile, i.e. a $\psi_B=0.001 \cdot l$ rotation is imposed at each end, where $l$ is the $z$ axial coordinate of the endpoints, being z=0 at the skew-symmetry plane.
The reaction moment associated with the constraint will determine the applied torque $T$.
evoluzione modelli cattedra
profilato_a_torsione_r4_v008.mud
attenzione: nel corso della lezione è stata applicata all'RBE2 al terminale una rotazione imposta pari a 0.0005*z, ove z è la coordinata z del terminale (z=0 all'antisimmetria). Il valore corretto è invece 0.001*z, coerentemente con la nuova versione della traccia. I seguenti modelli sono corretti.
profilato_a_torsione_r4_l1_chiuso_v009.mud
profilato_a_torsione_r4_l1_aperto_v009.mud