Indice
ESEMPI DI LINK RBE3
ESERCIZIO 1

(Il nodo di riferimento C è l’unico dipendente della distribuzione.)
La domanda è come questi 20N in direzione y negativa vanno a distribuirsi sui nodi della grezza meshatura in figura che tuttavia ci semplifica la trattazione.
E’ una distribuzione mediana? Quindi un asse principale di inerzia è sicuramente quello normale alla sezione quadrata passante per il baricentro ed inoltre per via della forma della sezione risulta che gli assi x, y, z sono assi principali di inerzia (è un caso particolare).
Tendenzialmente in questo tipo di esercizi sarà sempre così poichè altrimenti i calcoli si complicherebbero troppo e avrei bisogno di un manipolatore algebrico.
Individuo facilmente il baricentro della distribuzione: i 4 nodi hanno lo stesso peso unitario quindi il punto centrale della sezione è il baricentro della distribuzione. Devo prendere i 20N applicati e ridurli al baricentro. Ottengo 20N applicati al baricentro più una coppia di trasporto in direzione z negativo di 20N per 40mm.
Quindi al baricentro ho yg=-20N, zg=0, non ho momenti né su x, né su y ma ho un momento mz di 800N/mm. In questa maniera ho ridotto i carichi al baricentro. Ora devo chiedermi come distribuire questi carichi. Allora: abbiamo 4 nodi di pari peso, devo distribuire una forza baricentrica di 20N verso il basso, la forza bipartita base-peso sui 4 nodi implica che ognuno di questi 4 nodi si prenderà un quarto della forza, quindi 5N ciascuno.
inserire immagine
Non è l’unico contributo che ho, perché devo prendere anche quelli dei momenti e distribuirli. L’unico momento al baricentro non nullo è quello in direzione z che vale 880 N/mm.
Ogni nodo prende una forza che è tangenziale rispetto a questo nodo, ovvero se disegno la distanza proiettata tra il baricentro G e ogni singolo nodo risulta che le direzioni devono essere ortogonali a questa distanza proiettata.
Dopodiché, visto il verso della coppia posso definire il verso delle azioni, andando per esclusione. Il modulo deve essere proporzionale al peso e alla distanza, in questo caso i nodi hanno tutti la stessa distanza proiettata su x e y dal baricentro e tutti i nodi hanno lo stesso peso. Per i nodi prenderanno tutti la stessa quotaparte x di forza.
Ora facendo un semplice bilancio posso dire che la forza x agente sul singolo nodo vale


Questo vuol dire che quando vado a scomporre ognuna di queste forze in componente x e y, ognuna è equivalente a 10N sia in direzione x che y positive o negative a seconda del nodo considerato.
inserire immagine completa
Ora trovati i contenuti, i nodi vengono caricati con la somma di due contenuti. Di seguito una tabella riassuntiva.
| nodo | peso | forza nodale trasmessa | ||
|---|---|---|---|---|
| $X_i$[N] | $Y_i$[N] | $Z_i$[N] | ||
| 1 | 1.0 | -10 | -5 +10 | 0 |
| 2 | 1.0 | -10 | -5 -10 | 0 |
| 3 | 1.0 | +10 | -5 -10 | 0 |
| 4 | 1.0 | +10 | -5 +10 | 0 |
ESERCIZIO 2

Essendo una seziona quadrata, ho due coppie di assi principali di inerzia: uno preso per i punti di metà lato, l’altro passante per le diagonali. In questo caso mi viene più comodo considerare come assi principali di inerzia quelli passanti per le diagonali.
Il valore b mi aspetto che non influenzi il risultato poiché non compare nelle equazioni di equilibrio (il carico e la distanza b giacciono sulla stessa retta).

Come prima devo ridurre al baricentro l’azione di P allineata in 1. Chiaramente oltre alla forza uscente dal baricentro P avrò delle coppie di trasporto che posso risolvere su qualunque set di assi principali di inerzia (con le diagonali è più semplice).
Il modulo del carico P viene diviso in 4 e poi ripartito su ciascun nodo della distribuzione. Il modulo della coppia è invece pari a Pa/rad2, essa viene ripartita in base al peso (ma in questo caso conta poco perché è unitario) e alla distanza proiettata sul piano ortogonale all'asse principale di inerzia relativo all'asse principale di momento.
Vedo che sulla specifica geometria i nodi 4 e 2 hanno una distanza che di per sé non è nulla dal baricentro, ma che proiettata sullo specifico piano diventa nulla: quindi non si genera un momento poiché la proiezione del braccio sul piano è nulla.
Guardando il modello dell'immagine precedente di lato e ruotato in senso antiorario possiamo renderci conto di quanto valgolo le forze da applicare ai nodi facendo un semplice bilancio come nell'esempio 1



Ora sommando i vari contributi è possibile vedere la configurazione finale delle forze ridotte ai nodi

MODELLINO CONFRONTO DIRETTO RBE2 E RBE3


Abbiamo due piastre con foro centrale completamente incastrate al perimetro (in figura non è riportato l'incastro, ma solo i link ed il carico, perché ridondante); vogliamo distribuire sul perimetro del foro un carico e per fare ciò mi servo in di un link RBE2 per un modello e di un RBE3 per l'altro: per ora non specifichiamo quale modello abbia un link o l'altro, ci arriveremo con il ragionamento.
Lanciato il calcolo, questo è quello che si ottiene


Si vede subito che Rbe2 e RBE3 non sono interscambiabili, ovvero danno risultati completamente diversi.
A questo punto, se in figura sono mostrati gli spostamenti in z, quale modello ha il link RBE2 e quale RBE3?
Quello a sinistra del lettore contiene RBE2 mentre quello a destra RBE3 poiché, guardando il modello a sinistra vedo che i nodi su cui ho spalmato la forza giacevano su una circonferenza nell'indeformata e continuano a giacerci anche nella deformata, allora quello è un vincolo di corpo rigido, ovvero un RBE2; l'altro di conseguenza è RBE3. nota che l'unico moto di corpo rigido ammesso è la traslazione in z.
Parliamo adesso dell'altro modello, quello con vincolo RBE3, che è stato costruito con pesi omogenei su tutti i nodi della circonferenza (essendo la mesh uniforme non c'è motivo di usare pesi diversi: in generale conviene mettere pesi piccoli dove la mesh è più fine e pesi grandi dove la mesh è più grezza). Se plotto le tying force (ovvero le reazioni vincolari dei vincoli cinematici interni, in pratica ciò che RBE3 trasmette alla struttura) vedo che le reazioni elastiche degli elementi a cui è agganciato il link equilibrano la forza da me imposta; nota che non si generano momenti di trasporto. Per come è costruita la mesh vedo che ci sono tratti del bordo di circonferenza che sono più vicini al bordo esterno del modello, ovvero che sono più vicini all'incastro: un tratto di bordo più vicino all'incastro è implicitamente più rigido di uno lontano poiché è più vicino alla parte vincolata direttamente a terra. Ecco spiegato perché ci sono spostamenti in z non uniformi.
Le tying force associate al link RBE2 si comportano come prima: gli elementi con nodi vincolati generano reazioni elastiche che bilanciano la forza applicata al nodo ausiliario (quello con la sola funzione di prendersi il carico senza dare singolarità tensionale); tuttavia avendo aree a portanza differenziata ed essendo il moto imposto di corpo rigido è ovvio che nella zona a maggiore rigidezza dovrò applicare carichi maggiori per ottenere la stessa deformazione. Nella figura seguente sono mostrate le tying force z

Ultima considerazione che posso fare è che il nodo ausiliario del link RBE3 si muove come la media degli spostamenti degli altri nodi della circonferenza come si può vedere da questa immagine

Si può poi notare che il link RBE2 impone un vincolo di tangenza tra i gli elementi dei nodi vincolati e la circonferenza su cui giacciono i nodi stessi, per questo un link RBE2 distorce molto di più la struttura originale; di seguito un'immagine che meglio descrive il concetto

Si precisa infine che non esiste una regola generale per scegliere quale dei due link usare, però bisogna tener presente che il nodo C di RBE3 è un nodo dipendente e non può essere ulteriormente vincolato.
SINGOLARITA' TENSIONALI
I due file che saranno inseriti di seguito riguardano le condizioni note in cui compare una singolarità tensionale (è un riassunto dei casi possibili): si parlerà degli aspetti principali giusto per sapere cosa potrebbe succedere durante la modellazione al FEM.
Ricordiamo che con “singolarità tensionale” si intendono quelle situazioni in cui il calcolo al FEM diverge localmente in termini di tensione e a volte anche di spostamenti.
sinclair_i.pdf sinclair_ii.pdf
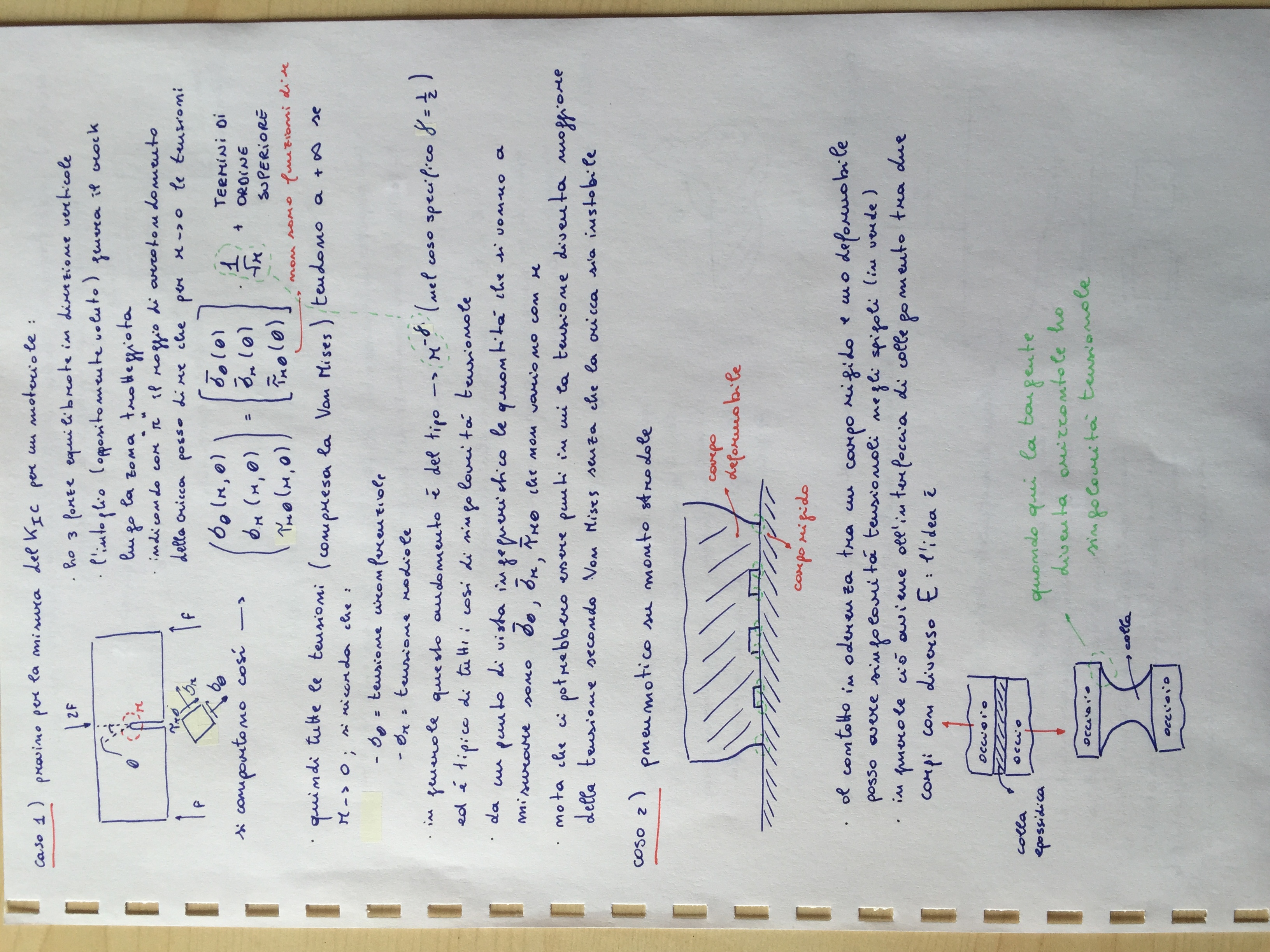
Premettendo che nei punti in cui la tensione va ad infinito è molto facile che si generino crack, si vuole dare una infarinatura su uno dei parametri della meccanica della frattura dal nome “stress intensity factor critico” o Kc presentando questa immagine in cui sono mostrati i modi di propagare di una cricca.

Per descrivere l'andamento della tensione in una zona in cui notoriamente la stessa tende ad un valore molto alto si usano formulazioni matematiche, nascono così denominazioni tipo singolarità quadratica o logaritmica: in forma approssimativa si può dire che il fattore di intensificazione degli sforzi è il coefficiente di proporzionalità tra la tensione e la funzione che ne descrive l'andamento. Il modo I è chiamato “modo di apertura in tensione”, il modo II “modo di scorrimento a taglio” ed il modo III “modo di lacerazione o strappo” (è l'unico con tensioni dirette fuoripiano).
VEDIAMO QUALCHE ESEMPIO
MODELLO PER SPIEGARE LA NON SINGOLARITA'


Questo modello presenta sei domini elastici in deformazione piana ognuno dei quali è incastrato sul lato di destra e soggetto ad un taglio di tipo parabolico sul lato di sinistra: ognuno rappresenta una trave, anche se un po' tozza; la particolarità sta nel fatto che il lato incastrato non è rettilineo ma circolare in modo che si formino angoli acuti alle estremità. In particolare la prima trave in alto a sinistra ha un angolo che è minore dell'angolo critico e muovendoci verso il basso si passa ad un modello con angolo critico ed infine supercritico; a lato ci sono modelli con angoli corrispondenti ma con mesh più fine, giusto per confronto. Lanciamo il calcolo e vediamo come è fatta la deformata

Andiamo a vedere come sono le tensioni secondo Von Mises nel caso di mesh più fine nello spigolo superiore di ognuno dei tre casi.
Supercritico

Critico

Subcritico

E scendendo più nel dettaglio

Quindi si può vedere che passando dal caso supercritico al caso subcritico la tensione tende ad abbassarsi se ci si avvicina all'apice dell'angolo.
In particolare le azioni tensionali preferiscono scaricarsi prima di arrivare all'apice dell'angolo, è come se la forma del materiale schermasse l'apice.
Algoritmo di contatto utilizzato da MSC.Marc
Ecco come procede il Marc per accorgersi che due corpi stanno entrando in contatto.

L'immagine successiva serve per far capire che un corpo discretizzato è un corpo perfettamente geometrico e quindi un algoritmo di contatto avanzato non può usare il corpo discretizzato: si usa allora una funzione spline sul contorno del corpo.

Infine si riporta un esempio di problema che potrebbe verificarsi.

{kind=link}
{kind=link}
{kind=link}
chiosa link RBE2 e RBE3
Singolarità tensionali
Articoli di review sulle singolarità tensionali, GB Sinclair.
Rilevazioni singolarità tensionali al FEM, sempre GB Sinclair et al.. sinclair_et_al_practical_convergence_divergenze_checks_for_stresses_from_fea.pdf
Esempio risposta FEM nell'intorno di una transizione singolare / non singolare. test_singolarita_clamped-free_v2005r3.mud
moltiplicatori di Lagrange
Carlos Felippa, Multifreedom Constraints II, paragrafo 9.3 e sottoparagrafi.
Discussione
Sono presenti passaggi/formule/immagini che non rispettano le regole di composizione? La fruibilità del testo ne risente? Indicare puntualmente le correzioni richieste.
Nella prima parte, precisamente nell'esercizio 1, a volte il testo risulta non troppo chiaro. In particolare ho trovato poco comprensibile la parte dove si spiega come ridurre la coppia a forze ai nodi, credo che con un'immagine risulterebbe molto più semplice. Inoltre nella frase “L’unico momento al baricentro non nullo è quello in direzione z che vale 880 N/mm.” bisogna correggere con 800 N*mm. Anche un pò prima era stato scritto “momento di 800N/mm”, mettere N*mm. Il resto del testo è chiaro.
Il testo proposto è coerente con gli appunti personali del revisore?
La parte degli esercizi e RBE2/RBE3 riferiti a piastra forata sì. Nelle singolarità tensionali c'è solo la cricca mentre a lezione erano stati fatti anche altri casi (materiale deformabile tra corpi indeformabili a trazione-vedere singolarità sulla tangenza del materiale deformato, ecc) Mancano completamente le parti sull'algoritmo di contatto e sui tipi di contatti (progressivi, recessivi, stazionari e regressivi).
Indicare se l'aggiunta di una o più figure agevolerebbe la fruibilità del testo.
Solo nel primo esercizio: aggiungerei immagine che spiega come scegliere le forze equivalenti alla coppia e un'altra con le componenti di forze lungo x e y ad ogni nodo.
Riuscirebbe uno studente che non ha seguito la lezione a preparare gli argomenti trattati sulla base di questi appunti? Quali modifiche renderebbero gli appunti più fruibili?
Riuscirebbe per la parte che c'è.
Ore dedicate a questa revisione: 1