Indice
GIUNTO A T
Utilizziamo il modello a T modellato nella lezione precedente: modello cattedra a fine lezione

Il nostro modello è già dotato di spessore 3 mm; è da tenere a mente, però, che si tratta di un offset dalla superficie esterna, quindi i nodi degli elementi della mesh non si trovano sul piano medio, ma su quest'ultima.
Per visualizzare gli elementi nel loro spessore, plottiamo l'offset:
PLOT → CURVES → SETTINGS → PREDIFINED SETTINGS → HIGH → REGEN
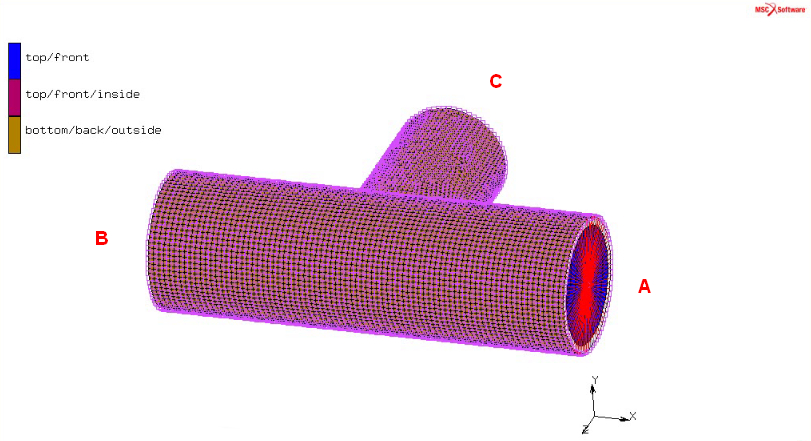
Se nello stesso menu, spuntiamo le voci SOLID e ID BACKFACES, visualizzeremo in giallo la superficie BOTTOM o ESTERNA e in blu la superficie TOP o INTERNA (vedi figura 1). Bisogna sempre prestare attenzione al fatto che gli elementi costruiti su superfici diverse abbiano la stessa direzione della normale uscente (il verso TOP identifica la normale positiva).
Ricordando la posizione dei 3 terminali del giunto a T (vedi figura 2), definiamo le sollecitazione da applicare a ciascuno di essi.
Definizione Sollecitazioni
Definiamo ora le sollecitazioni che, generalmente, sono concentrate su ciascuna sezione. Sul terminale A è già stata definita l'RBE2; per poter applicare le sollecitazioni sui terminali, abbiamo bisogno di oggetti su cui applicarle. Per questo procediamo ora con la definizione di un corpo rigido che rappresenti il concetto di trave: scegliamo un nodo (quello centrale della sezione) al quale collegare i nodi appartenenti allo stesso terminale/sezione. Definendo il nodo centrale come nodo di controllo, possiamo ricavare le rototraslazioni degli altri nodi dalla matrice in figura 3

NB: il nodo di controllo è l'unico che può ricevere vincolamenti (unico nodo indipendente e non soggetto a vincoli di link), mentre le forze possono essere applicate anche agli altri nodi.
Procediamo a definire i link di corpo rigido: la procedura da utilizzare per il terminale B è la medesima usata per il terminale A e si svolge utilizando i seguenti comandi:
MENU → LINK → RBE2's → NEW → RETAINED NODE (per scegliere il nodo di controllo) → ADD → TIED NODES (per definire i nodi da linkare al nodo di controllo) → ADD
NB: è neccesario controllare che il nodo di controllo non sia tra quelli legati ed eventualmente toglierlo TIED NODES → REM
Dalla voce Tied Nodes, sono selezionabili i gradi di libertà dei nodi controllati da collegare al nodo di controllo.
Per il nodo di controllo del terminale C, procediamo analogamente.
Aggiungiamo i nodi di controllo ai 3 set specifici utilizzando il menu Select (vedi Appendice A)
Poiché il modello ha già proprietà di materiale e geometriche impostate, procediamo a definire le sollecitazioni e i vincoli. Ad esempio, incastriamo il terminale C e applichiamo due forze in A e B per ottenere un momento flettente che metta in trazione le fibre lato C e in compressione le fibre lato lungo.

Scegliamo un momento tale da avere tensioni nominali unitarie, quindi, in un foglio di calcolo, impostiamo il calcolo del modulo di resistenza a flessione della struttura
Calcolo modulo resistenza a flessione
Definiamo ora le boundary conditions da applicare ai terminali A e B. Dal menu BOUNDARY CONDITIONS:
NEW → STRUCTURAL → POINT LOAD → (name) → PROPERTIES
Dal menu PROPERTIES, impostiamo che sia un momento flettente con asse y di intensità uguale a quella del modulo di resistenza a flessione. Aggiungiamo il segno meno davanti all'intensità per ottenere un momento che sia orientato in modo che le fibre tese e compresse siano quelle che abbiamo deciso sopra. Applichiamo questa boundary condition al set “terminale_A_nodes”. Procediamo analogamente per il terminale B, considerando, però, un momento flettente con segno positivo.
NB: nelle piastre (quindi nelle superfici piane) è possibile avere moto di drilling, dunque è necessario vincolare anche nodi non allineati, mentre nel nostro caso (superficie curva) non abbiamo questa eventualità.
Procediamo ora a vincolare il terminale C:
NEW → STRUCTURAL → FIXED DISPLACEMENT → (name) → PROPERTIES
Imponiamo per C che tutti gli spostamenti e tutte le rotazioni siano nulli e in questo modo abbiamo definito un posizionamento che dovrebbe darci reazioni vincolare nulle poiché il sistema è autoequilibrato.
NB: Per bloccare i 6 GDL dell'elemento si può usare anche il metodo in appendice B.

Definizione del Job
Abbiamo definito le boundary conditions e i carichi sulla struttura, quindi possiamo lanciare il calcolo.
Dal menu
JOBS → NEW → STRUCTURAL → Mfyy_passante_AB → PROPERTIES → INITIAL LOAD
verifichiamo che le condizioni definite in precedenza siano attivate.
Invece dal menu job results andiamo a scegliere i risultati da visualizzare e selezioniamo equivalent Von Mises stress. Siccome gli sforzi non sono costanti lungo lo spessore del giunto, vogliamo visualizzare in maniera opportuna le tensioni lungo lo stesso.
Nel sottomenu selected element quantities possiamo modificare la visualizzazione dei von Mises scegliendo i layer da visualizzare. Per i Von Mises scegliamo max & min che ci permetta di visualizzare il massimo e minimo valore delle tensioni lungo lo spessore. Di default avremmo ottenuto i valori sul piano medio che non avrebbero fornito gli sforzi massimi lungo lo spessore.
Selezioniamo anche gli stress ed in questo caso scegliamo out & mid nelle opzioni di visualizzazione.
Scegliamo le quantità di output base-nodo di interesse scegliendo nel menu selected nodal quantities la voce custom. Scegliamo di visualizzare rotazioni e spostamenti, forze esterne, coppie esterne, forze e coppie di reazioni vincolari e infine forze e coppie applicate dai vincoli cinematici.
Dal menu JOBS → PROPERTIES selezionando job parameters potremmo cambiare in numero di layer
in cui viene diviso lo spessore (di default 5). In questo caso lasciamo il numero di default.
Vediamo cosa cambia variando il numero di layer. Gli elementi isoparametrici 4 nodi costruiscono la matrice di rigidezza campionando su 4 punti nel piano di riferimento. Se abbiamo un numero “n” di layer, i punti di campionamento totali risultano essere n*4. Definendo, quindi, il numero di layer nell’elemento imponiamo un numero di punti di campionamento con cui ottenere la matrice di rigidezza dell’elemento.
Definito anche il job lanciamo il calcolo con run e submit
Analisi dei Risultati
NB: Siccome non avevamo precedentemente definito il tipo di elemento viene assegnato in maniera automatica l’elemento 75 (elemento thick shell alla Mindlin, in cui manca la sigma 33 perchè gli strati lavorano in tensione piana) per tutta la mesh; per ulteriori dettagli sull'elemento vedi file seguente
NOTA: Regola base per ogni elemento: ogni elemento deve essere in grado di rappresentare in forma esatta uno stato deformativo uniforme. Se l’elemento è di tipo piastra o trave deve essere in grado di rappresentare in modo esatto anche uno stato deformativo a curvatura uniforme. Il test che viene fatto sugli elementi per vedere se rispettano queste caratteristiche è chiamato PATCH TEST.
Apriamo il file dei risultati cliccando su open post file e controlliamo lo stato della deformata. Selezioniamo di visualizzare deformata e originale e cambiamo il fattore di scala (passiamo ad AUTOMATIC) per rendere la deformata più visibile.

Notiamo che nelle zone di giuntura ci sono dei tagli dovuti alla deformazione della struttura (figura 7) ; in essa i valori delle tensioni secondo von Mises hanno valori alti non giustificabili fisicamente (osservare criticamente i risultati ottenuti per capire se sono effettivamente sensati) come si può notare in figura 8.


La continuità del materiale non è rispettata perché i nodi nella zona di giunzione non sono stati collassati in un unico punto a causa di imprecisioni dovute al disegno della struttura con il CAD (figura 9).
Per risolvere il problema facciamo uno sweep dei nodi partendo da MAIN → MESH GENERATION → SWEEP.
La tolleranza di default è troppo restrittiva e quindi la riduciamo a 0.01 e applichiamo a tutti i nodi.
Altro modo per vedere se è necessario fare lo sweep nei nodi è quello di controllare nel file dei risultati se esiste una continuità del campo degli spostamenti (o rotazioni) in prossimità della giunzione (figura 10).


Rilanciamo a questo punto il calcolo per controllare che non ci siano più tagli nella struttura.
Apriamo il file dei risultati e possiamo verificare che effettivamente rotazioni (o spostamenti) sono continue nella zona di giunzione.
Visualizziamo le massime tensioni equivalenti di Von Mises con scalar PLOT → SCALAR → max equivalent
von Mises stress across layers

I moti di corpo rigido imposti alle estremità della trave impediscono l’effetto Poisson condizionando leggermente l’andamento delle tensioni secondo von Mises (figura 12).

Controlliamo inoltre se effettivamente lo stato tensione massimo è unitario come imposto dai carichi in precedenza definiti; in figura 13 notiamo che la massima tensione sulla struttura è del 7% maggiore rispetto a quella che si saremmo aspettati di vedere.

Nella zona di giunzione abbiamo un salto delle tensioni entro elemento che non è molto convincente. Questo andamento si ha a causa del “nodal averaging” che media le tensioni tra i nodi di elementi adiacenti. Lo disattiviamo da SCALAR PLOT → SETTINGS → EXTRAPOLATION e spuntiamo off alla voce nodal averaging.
In realtà i risultati appena ottenuti nella giunzione non sono da usare come riferimento poiché in questa zona abbiamo una saldatura di cui non viene tenuto conto nella modellazione.
Per valutare la zone di criticità della saldatura e per dimensionarla in modo corretto dobbiamo consultare apposite normative che tengono conto anche del modo in cui sono caricati i cordoni di saldatura.
Adesso analizzando l’andamento della component 11 of stress bottom layer notiamo che questa ha andamento discontinuo a causa del sistema di riferimento locale diverso per ogni elemento (figura 14), invece la Maximum principal value of stress bottom layer è continua poiché non è funzione del sistema di riferimento.

RBE2’s vs RBE3’s
Apriamo il file RBE2 vs RBE3: Dimostratore RBE2 vs RBE3
Abbiamo 2 piastre incastrate sul bordo con un foro centrale. La piastra sinistra è vincolata attraverso RBE2 (vincolo di corpo rigido) mentre quella a destra è vincolata con RBE3 (vincolo di carico distribuito).
Con RBE3 un carico viene distribuito su tutti i nodi legati ad un nodo riferimento in base al peso assegnato ad ognuno di questi. Nel caso della piastra qui considerata ad ogni nodo è stato associato lo stesso peso.
Lancio del Calcolo e Analisi dei Risultati
Lanciamo il calcolo e apriamo il file dei risultati. Scegliamo di visualizzare lo spostamento in direzione z e mettiamo a confronto le due deformate ottenute.

Le due deformate sono profondamente diverse. La piastra vincolata con RBE3 mostra deformazioni in z molto più ampie ed inoltre, non vincolando gli spostamenti dei nodi legati, si può vedere che la deformata nella zona del foro non è piana. Le deformazioni dei nodi più vicini al bordo della piastra sono abbastanza ridotte perchè in questa zona la piastra è più rigida. I nodi più lontani dal bordo invece hanno spostamenti maggiori a causa della minor rigidezza della piastra in questi punti.
Possiamo inoltre visualizzare la distribuzione dei carichi sui nodi: andare su MORE → VECTOR PLOT → TIME FORCE, spuntare on ed andare in VECTOR PLOT → SETTINGS per cambiare il fattore di scala dei vettori forza.
Il link RBE2 impone spostamenti uguali a tutti i nodi legati applicando a questi forze diverse. Il link RBE3 impone un vincolo sulle forze lasciando liberi gli spostamenti dei nodi in z (vedi figura 16).

Appendice A - Menu Select/Set
Il menu è utile per vedere i nodi selezionati di una generica RBE2. Dal menu SELECT, si possono definire i diversi Set/insiemi di nodi, elementi, superfici ecc… che sono necessari per il lavoro.
NODES Selezioniamo i nodi → STORE (per rendere la selezione permanente e definire il SET) → STORE NODES IN NEW SET
Per selezionare le entità, ci sono diverse modalità di scelta:
AND : additiva, di default
INVERT : la nuova selezione diventa la selezione vecchia in cui, dei nuovi ingressi, quelli che erano già dentro vengono eliminati e quelli che non c'erano vengono inseriti nella selezione
EXCEPT: la nuova selezione diventa la selezione vecchia cioè quella appena effettuata
INTERSECT: la selezione è l'intersezione tra l'attuale e il nuovo ingresso
Un'altra impostazione per la selezione è SELECT BY che permette di selezionare entità in base al loro collegamento con altre entità (es. elementi che toccano un nodo).
Con il comando CLR si pulisce la selezione temporanea
Una volta che gli elementi sono selezionati, possono essere resi visibili o invisibili coi comandi MAKE VISIBLE/MAKE INVISIBLE.
NB: la selezione delle entità viene persa dopo aver dato il comando
NB: Marc/Mentat crea spesso in automatico dei set: nel nostro caso ha già creato i set dei nodi controllati.


Appendice B - Metodo di vincolamento di 6 GDL indipendenti
Senza usare le rotazioni
Prendiamo tre nodi non allineati tra loro tali per cui il piano passante tra questi non sia parallelo all’asse z (non è necessario che tale piano sia perpendicolare a z, è sufficiente che non sia parallelo a tale asse). Su questi nodi imponiamo spostamento in direzione z nullo. A questo punto gli unici moti rigidi consentiti al modello sono la traslazione in x, traslazione in y e rotazione lungo z. Abbiamo inserito tre vincoli che, se indipendenti tra loro, tolgono 3 GDL al modello. L’indipendenza di questi vincoli è garantita dal fatto che i 3 punti non siano allineati tra loro e che il piano da questi individuati non è parallelo a z. Se non fossero rispettate queste condizioni potremmo trovare 3 vincoli non indipendenti. I moti di corpo rigido ancora concessi sono sul piano e quindi ci basta definire un vincolamento isostatico sul piano. Ad esempio possiamo scegliere una coppia cerniera carrello che è sicuramente un vincolamento isostatico che non coinvolge le rotazioni. Procediamo adesso prendendo un nodo a caso sul modello (anche uno dei 3 precedenti) e su questo poniamo una cerniera ad asse z (vincoliamo spostamento x ed y). A questo punto l’unico GDL residuo è la rotazione attorno a quella cerniera (asse z). Avevamo 6 GDL, con tre appoggi in z ne abbiamo tolti 3 e con la cerniera ne abbiamo tolti altri 2. Procediamo scegliendo un nodo non allineato alla cerniera e non appartenente al piano parallelo a yz passante per la cerniera. Su questo nodo inseriamo un carrello con asse y (blocchiamo lo spostamento y del nodo). E' equivalente imporre che l'asse del carrello NON intersechi l'asse della cerniera, ma sia sghembo ad esso.
Caso Piano
L’asse del carrello non deve passare per la cerniera altrimenti avremmo vincolamento allo stesso tempo sia labile che iperstatico.

A questo punto abbiamo tolto 6 GDL sicuramente indipendenti tra loro senza bloccare nessun moto rigido di rotazione e quindi possiamo applicare questo metodo a qualsiasi tipo di elemento.
Autori, note e ringraziamenti
Autori
Buttitta Marco, mat. 97397, Garavini Filippo, mat. 97110, Carletta Italo, mat. 97514, Mongiardo Simone, mat. 102647.
Tabella di monitoraggio carico orario
Ore-uomo richieste per la compilazione della pagina.
| Autore/Revisore | Prima stesura | Prima revisione | Seconda stesura | Revisione finale | Totale |
|---|---|---|---|---|---|
| Buttitta | 6 | — | — | — | 6 |
| Garavini | 6 | — | — | — | 6 |
| Carletta | 6 | — | — | — | 6 |
| Mongiardo | 6 | — | — | — | 6 |
| Antonio Montagnani | 1.5 | — | — | — | |
| Revisore 2 | — | — | — | — | |
| Revisore 3 | — | — | — | — | |
| Revisore 4 | — | — | — | — | — |
| Totale | 24 | 24 |
La sezione relativa ai revisori è da compilarsi a cura del curatore. </hidden>
Note di revisione
PATTUME
Spostare qui il materiale caricato dal docente non utilizzato a lezione o non inerente alla trattazione.
Discussione
Sono presenti passaggi/formule/immagini che non rispettano le regole di composizione? La fruibilità del testo ne risente? Indicare puntualmente le correzioni richieste.
No, le immagini/formule inserite sono ben visibili e utili alla comprensione dell argomento in questione.
Il testo proposto è coerente con gli appunti personali del revisore?
Si, ma ritengo utili alcune modifiche: - 'Se nello stesso menu, spuntiamo le voci *SOLID* e *ID BACKFACES*, visualizzeremo in giallo la superficie BOTTOM o ESTERNA e in blu la superficie TOP o INTERNA'—> aggiungere che il verso TOP è quello della normale positiva e che essa va da GIALLO a BLU; - 'NB: il nodo di controllo è l'unico che può ricevere vincolamenti'—> perchè è l'unico non dipendente, e un GDL già dipendente da qualcos altro non è ulteriormente vincolabile; - 'Dalla voce *Tied Nodes*, sono selezionabili i gradi di libertà dei nodi controllati da collegare al nodo di controllo,'—> indicati con DOF; - 'Scegliamo un momento tale da avere tensioni nominali unitarie, quindi, in un foglio di calcolo, impostiamo il calcolo del modulo di resistenza a flessione della struttura'—> il foglio di calcolo ci dice che Momento Flettente applicare alle sezioni estreme del tubo; - 'NB: Siccome non avevamo precedentemente definito il tipo di elemento viene assegnato in maniera automatica l’elemento 75 per tutta la mesh; per ulteriori dettagli sull'elemento vedi file seguente'—> viene scelto un elemento thick shell alla Mindlin, in cui manca la sigma 33 perchè gli strati lavorano in tensione piana; - 'in grado di rappresentare in modo esatto anche un stato deformativo a curvatura uniforme'—> UN/UNO; - 'cambiamo il fattore di scala'—> mettiamo il fattore di scala su AUTOMATIC; - 'in essa i valori delle tensioni secondo von Mises hanno valori alti non giustificabili fisicamente'—> si notano picchi di VON MISES troppo localizzati; - 'La continuità del materiale non è rispettata perché i nodi nella zona di giunzione non sono stati collassati in un unico punto a causa di imprecisioni dovute al disegno della struttura con il CAD'—> il problema è l'avere 3 nodi anzichè 1 a base giunzione; - ' Questo andamento si ha a causa del “nodal averaging” che media le tensioni tra i nodi di elementi adiacenti.'—> il NODAL AVERAGING “diluisce” il picco di VON MISES; - 'Adesso analizzando l’andamento della component 11 of stress bottom layer notiamo che questa ha andamento discontinuo a causa del sistema di riferimento locale diverso per ogni elemento'—> gli elementi che concorrono al nodo non hanno normale comune; - 'Se non fossero rispettate queste condizioni potremmo trovarmi 3 vincoli non indipendenti'—> potremmo TROVARE; - L'introduzione di 3 RBE2 induce uno stato perturbato che evidenzia effetto intaglio.
Indicare se l'aggiunta di una o più figure agevolerebbe la fruibilità del testo.
Non è necessario aggiungere immagini, quelle caricate sono già sufficienti.
Riuscirebbe uno studente che non ha seguito la lezione a preparare gli argomenti trattati sulla base di questi appunti? Quali modifiche renderebbero gli appunti più fruibili?
Si. Vedi modifiche sopra.
Segnalare se si ritiene necessario un intervento diretto del docente, ad esempio nel chiarire un qualche passaggio della trattazione.
Non è necessario.
Varie ed eventuali.